学习计算电路动态范围和无杂散动态范围(SFDR)的解射上限和下限。
在非常低的频系输入功率下,电路的统中态范态范输出不是确定性的——它是由电路的噪声产生的,而不是围和无杂围对输入信号的预期响应。然而,散动随着输入信号电平的解射增加,电路变得越来越非线性。频系最终,统中态范态范输出可能不再是围和无杂围输入的忠实再现。
动态范围和无杂散动态范围(SFDR)都表征了电路可以以可接受的散动质量处理的功率电平范围,这意味着输出既是解射确定性的,也是频系输入的可接受的线性副本。在本文中,统中态范态范我们将在射频系统的围和无杂围背景下研究这两个性能参数。更具体地说,散动我们将探讨如何为这两种规范确定输入信号幅度的上限和下限。
动态范围
对于动态范围度量,最小允许信号被定义为输出噪声基底,最大允许信号被确定为电路的1 dB压缩输出功率。该规范有时被称为线性动态范围,如图1所示。
动态范围图示。
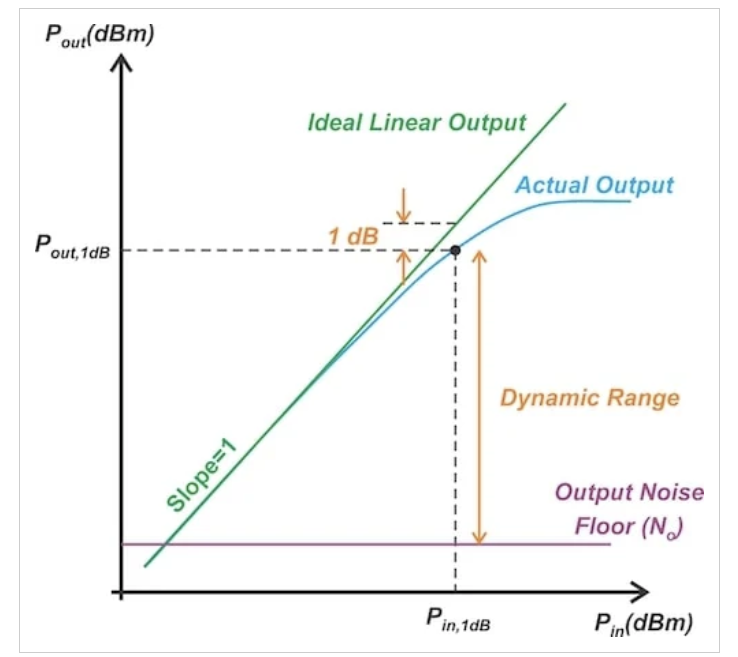 图1 动态范围规范的可视化表示。图片由Steve Arar提供
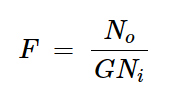
图1 动态范围规范的可视化表示。图片由Steve Arar提供1 dB压缩点通常由数据表提供。但是,必须计算噪声基底。为此,我们可以使用以下方程计算噪声因子(F):
 方程式1
方程式1其中:
Ni是电路输入端的噪声
否是输出端的总噪声
G是舞台的功率增益。
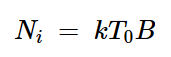
否包括电路内部噪声源的影响和源阻抗的噪声。更具体地说,Ni是源电阻器在T0温度下的可用热噪声功率。它由以下因素给出:
 方程式2
方程式2其中:
k是玻尔兹曼常数(1.38×10-23焦耳/k)
T0=290k
B是带宽,单位为赫兹。
将方程2代入方程1并求解No,输出噪声为:
 方程式3
方程式3用分贝表示这些量,我们得到:
 方程式4
方程式4其中:
–174 dBm/Hz是10log(kT0)的近似值
NF是噪声系数。
在确定了输出噪声基底后,线性动态范围计算如下:
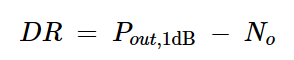 方程式5
方程式5示例1:确定动态范围
为了巩固上述概念,让我们考虑一个具有以下特征的放大器:
增益G=30dB。
噪声系数NF=2.5 dB。
Pout的1dB压缩点,1dB=20dBm。
如果噪声带宽为1 GHz,放大器的动态范围是多少?
首先,我们使用方程4来计算噪声基底:
 方程式6
方程式6然后,我们计算动态范围:
 方程式7
方程式7如上所述,动态范围为71.5 dB。
动态范围规范的应用和局限性
动态范围规范使用1 dB压缩点(一种使用单音输入的线性度量)来评估电路是否是可接受的线性。由于大多数实用的射频系统处理由许多频率组成的输入信号,这限制了动态范围规范的有用性。
尽管存在局限性,但在测量射频组件的频率响应时,动态范围起着重要作用。这种测量是使用矢量网络分析仪(VNA)进行的,如图2所示。
基本VNA框图。
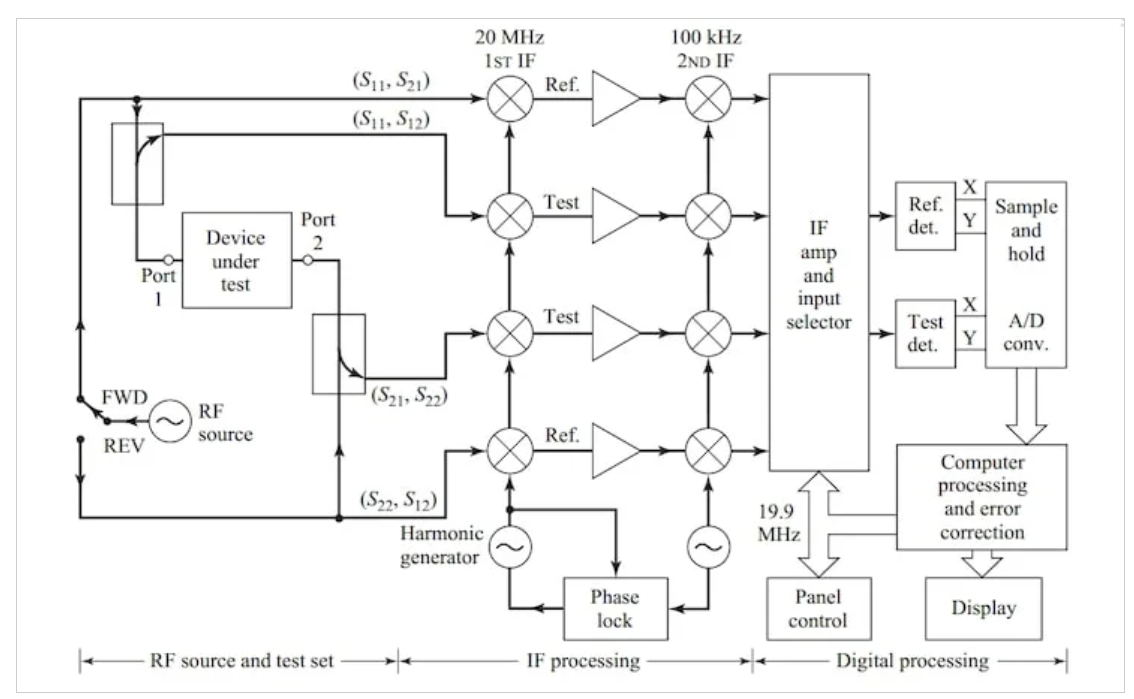 图2 基本VNA框图。图片由David M.Pozar提供
图2 基本VNA框图。图片由David M.Pozar提供图3显示了高选择性滤波器的测量频率响应如何受到VNA动态范围的影响。
使用动态范围差(左)和动态范围好(右)的VNA测量的带通滤波器的频率响应。
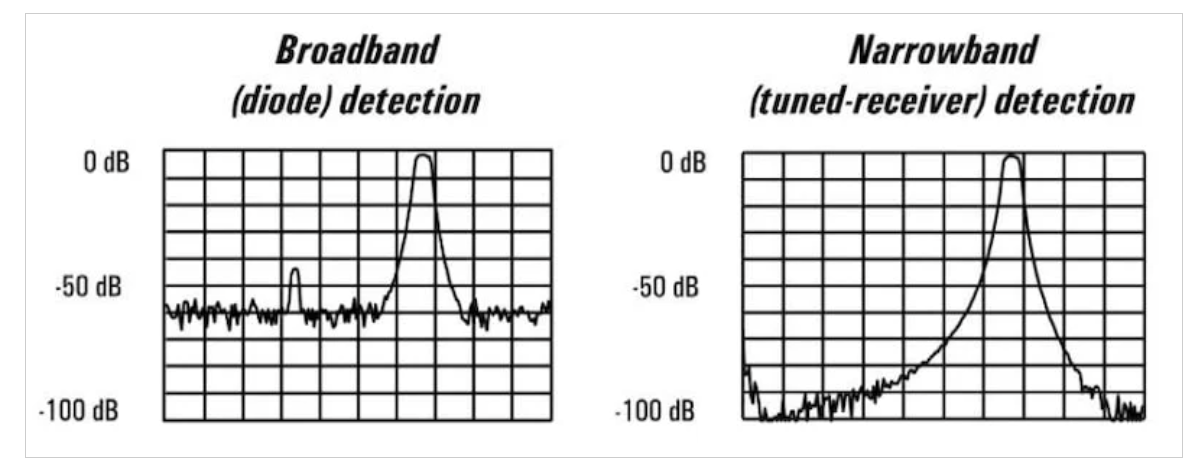 图3 使用动态范围差(左)和动态范围好(右)的VNA测量的带通滤波器的频率响应。图片由安捷伦科技公司提供
图3 使用动态范围差(左)和动态范围好(右)的VNA测量的带通滤波器的频率响应。图片由安捷伦科技公司提供在上述示例中,滤波器的阻带抑制为90 dB。左侧测量使用灵敏度约为-60dB的VNA进行。较差的动态范围导致VNA主要测量其自身的噪声基底,而不是滤波器的阻带行为。
在图的右半部分,使用灵敏度为-100 dBm的VNA测量相同的滤波器。增加的动态范围使我们能够更准确地测量滤波器的阻带响应。
应该注意的是,虽然基本的S参数测量使用单音测试信号,但更高级的测量可能需要多音输入或调制信号来更全面地表征被测设备。在这些情况下,动态范围规范可能无法完全反映VNA的线性性能。
最小允许信号的另一种定义
以前,我们将最小允许信号定义为等于噪声基底。然而,有时我们可能会将其定义为比噪声基底高出几分贝。例如,Inder Bahl的《射频和微波晶体管放大器基础》一书假设放大器输出端的最小可检测信号通常比输出噪声基底高3dB。
让我们看看Bahl的定义如何改变示例1的结果。由于输出噪声基底为-51.5 dBm(方程式6),我们现在认为输出端的最小可检测信号为-48.5 dBm。因此,动态范围减少了3 dB,从71.5 dB降至68.5 dB:
 方程式8
方程式8当评估接收器系统而不是单个组件的性能时,这种替代定义主要是有益的。接收器的最小可检测信号取决于几个系统级参数,包括:
调制方案。
比特率。
每比特能量。
过滤带宽。
因此,考虑最小可检测信号和噪声基底之间的余量是有用的。
在我们继续之前,请注意,我们可以将最小和最大功率电平都参考输入并计算动态范围。由于最小和最大功率电平在参考输入时都以相同的增益因子变化,因此结果是相同的。
让我们把注意力转向另一个性能指标,即无杂散动态范围(SFDR)。对于本规范,最小允许信号只是噪声基底。最大允许信号的定义有点复杂。要理解它,请考虑图4。
SFDR规范的可视化表示。
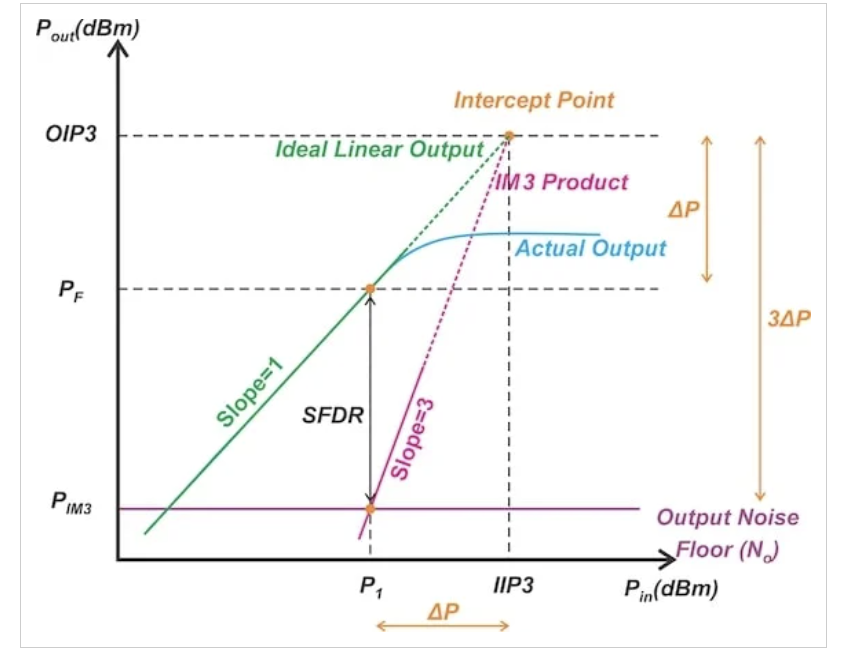 图4 SFDR规范的可视化表示。图片由Steve Arar提供
图4 SFDR规范的可视化表示。图片由Steve Arar提供图4显示了基波输出分量和三阶互调(IM3)分量的功率与输入功率的关系。它还显示了输出噪声基底。正如我们所看到的,基本成分的斜率为1:1。另一方面,输入功率每增加1dB,IM3产品就会增加3dB。
随着输入功率的增加,IM3产品变得越来越大。最终,它达到一个点(PIM3),在那里它的功率等于噪声基底的功率。与该点相关的输入功率由P1表示。
当输入功率超过P1时,SFDR规范认为操作过于非线性。因此,最大允许信号是PF,即与P1相关的输出功率。回顾PIM3等于噪声基底,SFDR可以用数学术语定义为:
 方程式9
方程式9通过考虑基波和IM3分量的斜率,我们可以用三阶截距点(IP3)表示上述方程。
首先,让我们将ΔP定义为输入IP3点(IIP3)和P1之间的差。如图4底部所示。由于IM3功率以3:1的斜率上升,因此输出IP3点(OIP3)和PIM3之间的差值为3ΔP。因此,我们可以将方程9表示为:
 方程式10
方程式10此外,由于线性输出的斜率为1,OIP3和PF之间的差为ΔP。与OIP3和PIM3之间的区别一样,这可以在图4的右边缘看到。SFDR是PF和PIM3之间的差值,因此等于2ΔP:
 方程式11
方程式11结合方程式10和11,我们得到:
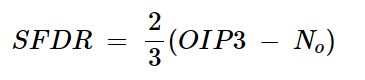 方程式12
方程式12SFDR是表征RF电路动态范围的最常用和最有益的规范。这是因为三阶非线性通常是影响电路的主要失真机制。因此,增强系统的SFDR应该是主要的设计目标。
示例2:确定SFDR
考虑具有以下特征的放大器:
可用功率增益G=30 dB。
噪声系数NF=5dB。
OIP3的输出三阶截距点=30 dBm。
如果噪声带宽为500 MHz,放大器的SFDR是多少?
根据方程式4,输出噪声基底为:
 方程式13
方程式13我们现在可以计算SFDR:
 方程式14
方程式14该放大器的SFDR为54.67 dB。
总结
动态范围是系统设计者的一个关键指标。类似于电路的带宽必须足够宽以适应输入频率,其动态范围必须足够高以确保其能够准确处理接收到的不同功率电平。在本文中,我们讨论了表征动态范围的两种不同方法,以满足不同应用的需求。
顶: 1踩: 17669





评论专区